Dans cette leçon, le plan est muni d’un repère orthonormé direct(0,I,J).
(C) est le cercle trigonométrique, I’ et J’ sont les points de (C) diamétralement opposés respectivement à I et J. (T) est la tangente à(C) en I. L’unité de mesure d’angle est le radian.
A- SITUATION D’APPRENTISSAGE
Un élève de 1ère C d’un lycée Moderne fait des recherches sur les équations et inéquations dans R dans la salle multimédia de son établissement. Il découvre des équations de types :
cos x = a; sin x = a; tan x = a (a ∈ R) ; acos x + bsin x + c = 0 (a ≠ 0 et b ≠ 0).
Il présente ses recherches à ces camarades de classe. Ceux-ci constatent que ces équations ne sont pas habituelles. Ils décident d’approfondir leurs connaissances sur la trigonométrie afin de résoudre ces équations.
B- RESUME DE COURS
I- ANGLES ORIENTES
1) Mesures d’un angle orienté
a) Définition

Remarques

• Si x est une mesure d’un angle orienté, les mesures de cet angle orienté sont les nombres réels de la forme x + 2kπ ; (k ∈ Z)
• Toutes les mesures d’un même angle orienté ont le même point image M sur (C).
Notations :
![]()
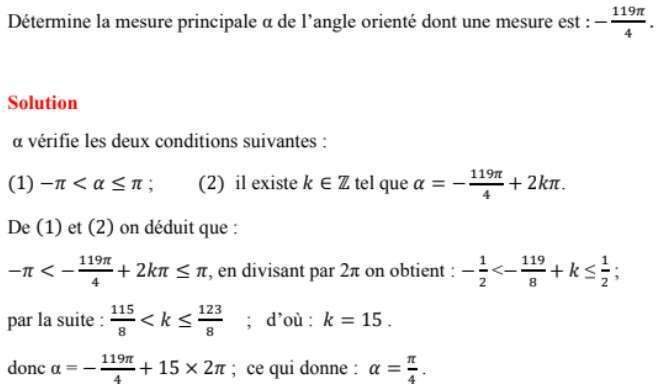
b) Recherche de la mesure principale d’un angle orienté
Propriété :
Soit α̂ un angle orienté de mesure α, α ∈ IR. Il existe un unique nombre réel x ∈ ]–π ;π] tel que Mes(α̂) = x.
Méthode
Déterminer la mesure principale α d’un angle orienté dont une mesure x est connue, consiste à écrire
α = x + 2kπ où −π < α ≤ π et k ∈ Z.
• Cette écriture peut être immédiate.
• Sinon, on détermine tout d’abord k à l’aide des inégalités −π < x + 2kπ ≤ π ;
• Puis l’on détermine α à l’aide de l’égalité α = x + 2kπ.
Exercice de fixation
2) Somme et différence de deux angles orientés
Définitions
Soient α̂ et β̂ deux angles orientés de mesures respectives α et β.
• On appelle somme des angles orientés α̂ et β̂ et on note α̂ + β̂ l’angle orienté dont une mesure est α + β.
• Deux angles orientés sont opposés lorsque leur somme est l’angle orienté nul. L’opposé de α̂ est noté –α̂, il a pour mesure −α.
• La différence des angles orienté α̂ et β̂ , noté α̂ – β̂ est l’angle orienté α̂ + (−β̂) dont une mesure est α – β.
Exemple :

Remarque
α̂ + β̂ = β̂ + α̂
II - PROPRIETES DES ANGLES ORIENTES
1) Relation de Chasles
Propriété
![]()
EXERCICE DE FIXATION
A , B, C et D sont quatre points distincts. Choisis l’égalité correcte :

SOLUTION
L’égalité correcte est b)
Conséquences
Soient u→ et v→ deux vecteurs non nuls et k un nombre réel non nul on a :

EXERCICE DE FIXATION
Soient u→ et v→ deux vecteurs non nuls.
Ecris le numéro de l’égalité suivi de VRAI si l’égalité est juste ou de FAUX si l’égalité n’est pas juste.

SOLUTION
1- FAUX ; 2- VRAI ; 3- VRAI ; 4- VRAI ; 5- FAUX
2) Double d’un angle orienté
Définition

Exemple


Remarques
• Le double d’un angle orienté de mesure α a pour mesure 2α.
• Soient α̂ et β̂ deux angles orientés ; on a : 2α̂ + 2β̂ = 2(α̂ + β̂).
Propriétés

CORRIGÉ

3) Angles orientés et cercle
a) Angles orientés inscrits dans un cercle.
Propriété
Soit (C) un cercle de centre O ; A et B deux points distincts de ce cercle. Soit M un point de (C) distinct de A et B

Exercice de fixation

b) Caractérisation d’un cercle
Soit (C) un cercle de centre O ; A et B deux points distincts de ce cercle. Pour tout point M du plan distinct de A et B on a :
![]()

Solution
Figure b)
c) Points cocycliques
Propriété
Soient A, B, C et D quatre points distincts du plan tels que trois quelconques d’entre eux ne sont pas alignés.
![]()
EXERCICE DE FIXATION
Soit ABC un triangle rectangle en C et D le symétrique de C par rapport à la droite (AB).
Démontre que les points A, B , C et D sont cocycliques.
Solution
Les triangles ABC et ABD sont rectangles respectivement en C et en D

III- TRIGONOMETRIE
1) Lignes trigonométriques d’un angle orienté
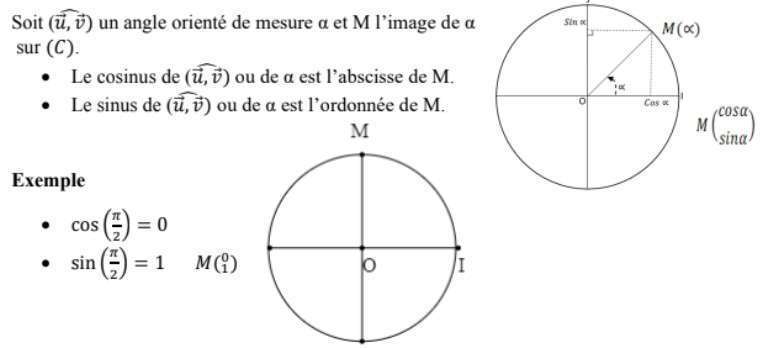
a) Cosinus et Sinus d’un angle orienté
Définition
b) Tangente d’un angle orienté
Définition

Remarques
• cosα, sinα et tanα sont appelés lignes trigonométriques de l’angle orienté de mesure α
Le tableau ci-dessous indique les lignes trigonométriques des angles remarquables

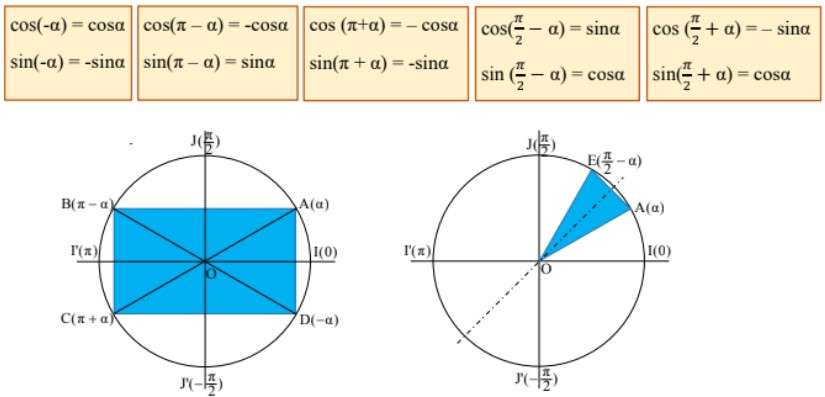
c) Lignes trigonométriques d’angles associés
Soit α̂ un angle orienté de mesure α.
Les angles orientés de mesures –α, π − α, π + α, π/2− α ,π/2 + α sont dit associés à α̂
Propriété
Pour tout nombre réel α on a :
EXERCICE DE FIXATION
Détermine cosα et sinα dans chacun des cas suivants :

2) Formules trigonométriques
a) Formules d’addition
Propriétés
Pour tous nombres réels a et b, on a :
1) cos (a + b) = cos a cos b − sin a sin b
2) sin (a + b) = sin a cos b +cos a sin b
3) cos (a − b) = cos a cos b + sin a sin b
4) sin (a − b) = sin a cos b − cos a sin b
EXERCICE DE FIXATION

b) Formules de duplication et de linéarisation
Propriété
Pour tout nombre réel a, on a :

EXERCICE DE FIXATION
Pour chacune des propositions suivantes, trois réponses sont proposées ; une seule est exacte.
Ecris le numéro de l’affirmation suivi de la lettre correspondant à la bonne réponse.

CORRIGÉ
1-B ; 2-C ; 3-A ; 4-A
3) Fonctions circulaires
a) Fonctions cosinus ; fonctions sinus
Définitions
• On appelle fonction sinus, la fonction notée sin : R ⟶ R
x ⟼ sinx
• On appelle fonction cosinus, la fonction notée cos : R ⟶ R
x ⟼ cosx
b) Représentations graphiques des fonctions cosinus et sinus
Pour construire les courbes représentatives des fonctions : x ⟼ sinx et x ⟼ cosx, on construit les courbes sur ]−π, π] puis on complète en utilisant les translations de vecteurs 2πOI→ et −2πOI→ .
Représentation graphique de la fonction sin

Représentation graphique de la fonction cos

b) Fonction tangente
La fonction tangente notée tan est la fonction : tan : R ⟶ R
x ⟼ tanx

Exemple
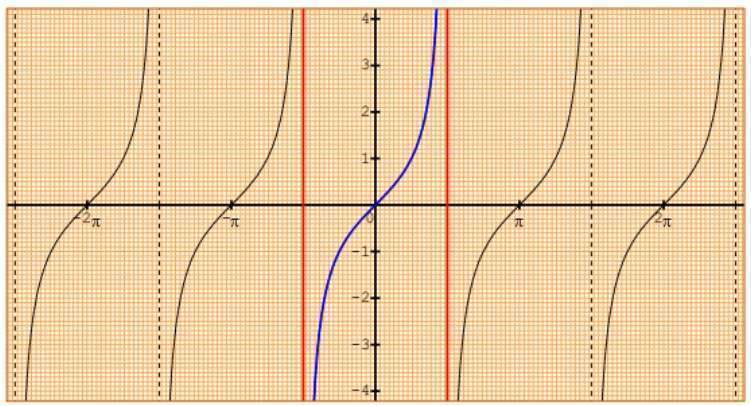
Représentation graphique de la fonction tangente dans le plan muni d’un repère orthonormé
EXERCICE DE FIXATION
Le plan est muni d’un repère orthonormé (O, I, J). Représente graphiquement la fonction :
f : x ↦ cos (2x + 5)
CORRIGÉ
Représentation graphique de la fonction x ↦ cos (2x + 5)

IV- EQUATIONS TRIGONOMETRIQUES
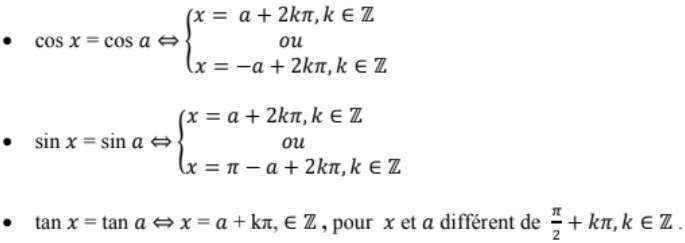
1) Equations du type : cos x = cos a ; sin x = sin a et tan x = tan a
Propriétés
Pour tous nombres réels x et a, on a :
EXERCICE DE FIXATION
Résous dans R chacune des équations :

SOLUTION


Remarques : cas particuliers d’équations trigonométriques
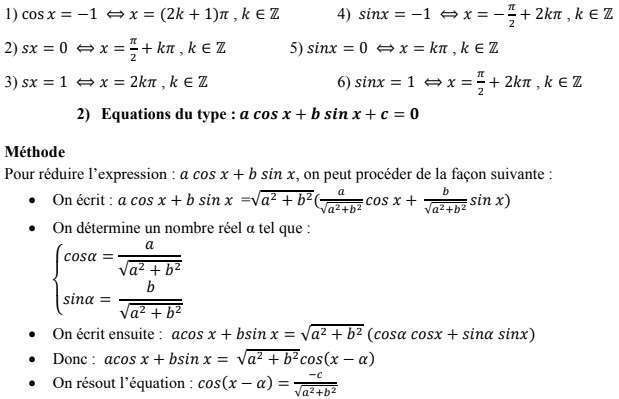
EXERCICE DE FIXATION
Résous dans R l’équation (E) : √3cox + sinx = √2
Solution :

V- INEQUATIONS TRIGONOMETRIQUES
Les résolutions d’inéquations trigonométriques seront traitées sous forme d’exercices.
EXERCICE DE FIXATION



C- SITUATION COMPLEXE
Au cours d’une séance de travaux dirigés en Physique chimie, des élèves de 1ère C découvrent la figure ci-contre :
Cette figure représente un couloir de largeur √3 m qui tourne à l’angle droit et cette largeur n’est plus alors que de 1 m
Sur la figure, une droite passe par O fait avec l’un des murs un angle α et coupe les deux autres murs en A et
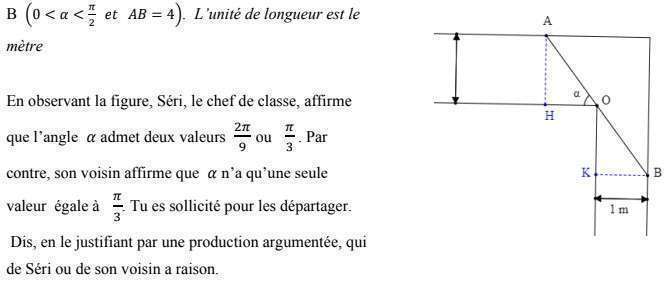
SOLUTION
Pour départager Séry et son voisin, nous allons utiliser nos connaissances mathématiques sur la leçon angles orientés et trigonométrie.
Pour ce faire, Nous allons :
– En fonction des données connues, obtenir une
– équation contenant une ligne trigonométrique de α.
– Résoudre l’équation obtenue pour trouver (si possible) les valeurs de α.


D- EXERCICES
A) Exercices de fixation
Exercice 1

Exercice 2
Exercice 3
Relie chaque élément du tableau A à l’élément du tableau B qui lui est égal.

Exercice 5
Dans chacun des cas suivants, détermine le sinus et le cosinus de l’angle orienté (u→ ̂, v→ ) de mesure α.
a) α = π b) α = 0 c) α = −π/2
SOLUTION

Exercice 6



Exercice 9
ABCD est un carré de centre O et de sens direct. Relie chaque élément du tableau A à un élément du tableau B qui lui est égal.

SOLUTION

SOLUTION
B) Exercices de renforcement
Exercice 11
SOLUTION

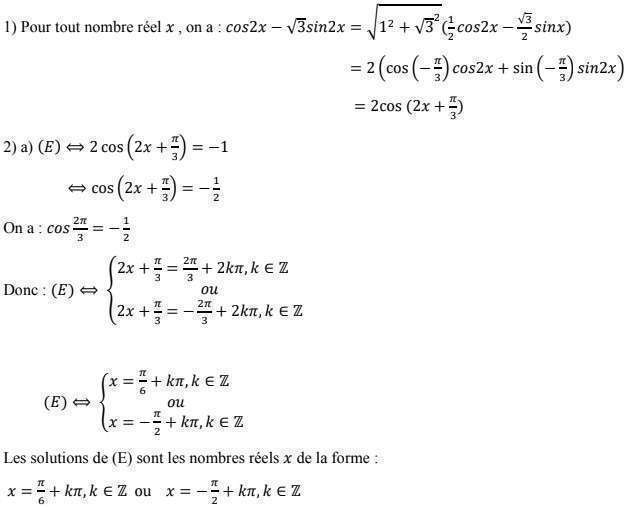
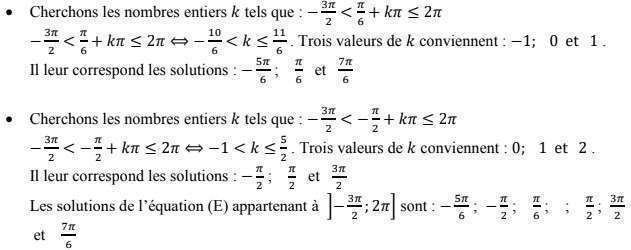
2) a) Résous dans R l’équation (E) : cos2x − √3sin2x = −1.
b) Représente les solutions sur le cercle trigonométrique.![]()
SOLUTION
b)

c )
C) EXERCICE D’APPROFONDISSEMENT
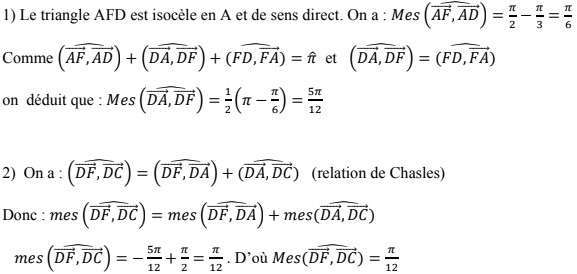
Exercice 5
ABCD est un carré de sens direct. ABF et CBE sont des triangles équilatéraux directs
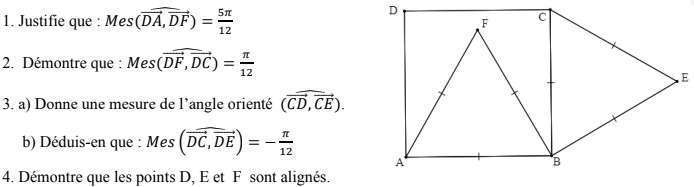
SOLUTION

You must be logged in to take the quiz.
